03
Drawing with Pulse:
User Testing for Drawing Machine
26.08.2024 ~ 1.09.2024
Drawing Machine: Feedback
-
Feedback
Jung Yun So
The feedback was mostly on how to proceed with this experiment and I was glad that they aligned with what I wanted to proceed with, such as making more iterations and user testing. I assume that it means my supervisor and peers find this interesting as well. Although for now I’ve only shown them the motion of the brachiograph and it didn’t function very well at the school for some reason. Which also reminds me to come early and set up when I need to present or share my tasks with others.
Although I had taken a lot of images and videos of myself making the drawing machine and the final drawings, many of them seemed redundant. For this week, while I do my user testing, I will be able to document the actual interaction and variety of outcomes. Also, the pulse sensor wasn't prperly calibrated, which is something I should start with.
Morphological Chart (sort of)
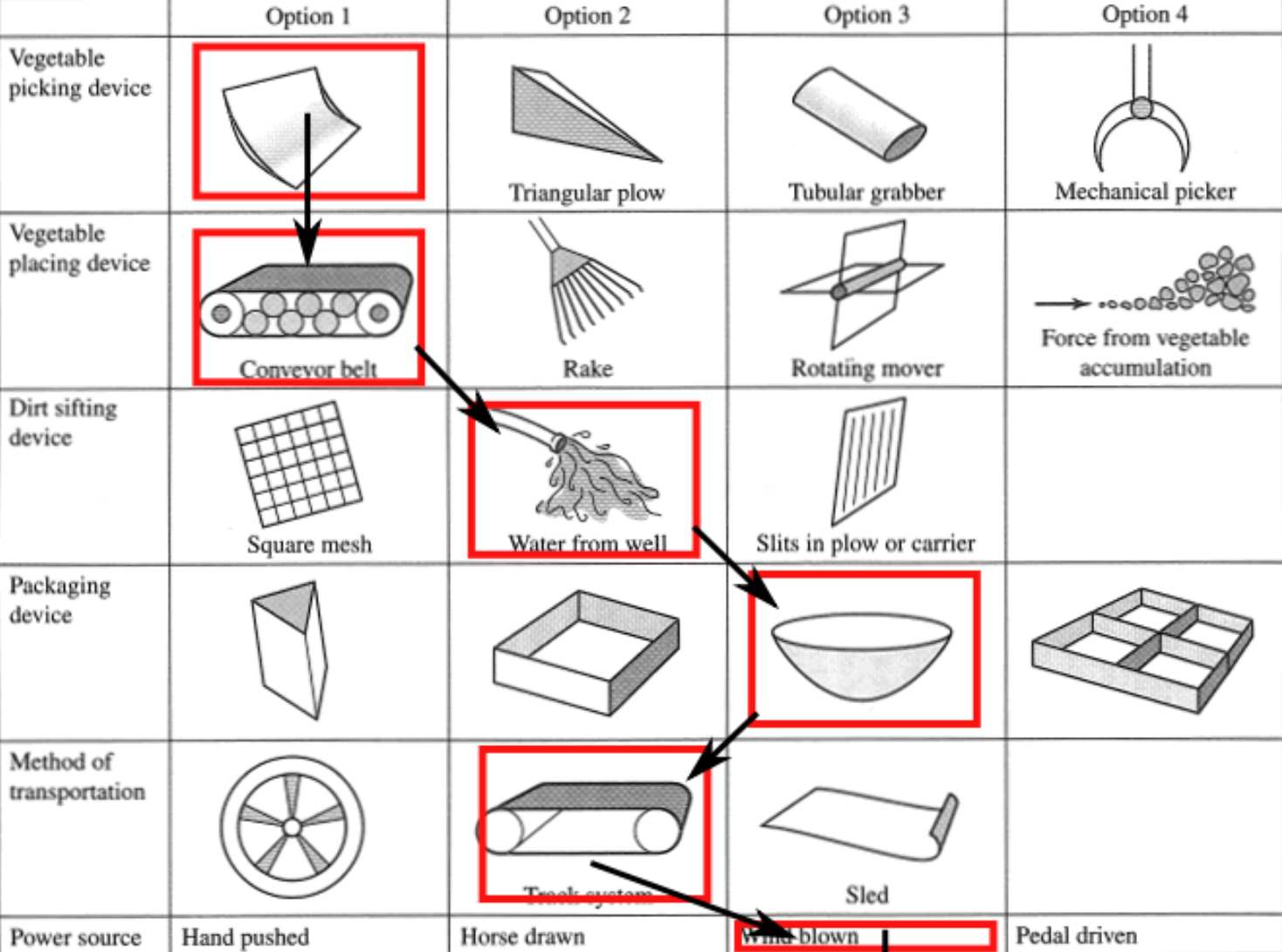
Morphological Chart
Jung Yun So
Moving on to the iterations, this week I will focus on refining the code and movement of the Arduino, rather than experimenting with physical elements like using different mediums for drawing. Although I will move on to user testing afterwards, I would like to note that the goal here isn't about establishing functionality. I’m trying to document the interaction between objective data and subjective interpretation, later shaping my prototypes based on both feedback and reflections.
The chart I am using is based on a morphological chart, a tool commonly used in product design for morphological analysis. This method involves breaking down a system into its basic components and analysing the possible variations of each to consider different possibilities. I believe this approach aligns well with my process, as I'm applying an analytical framework while introducing subjective criteria based on how I perceive the results. The options will become more refined later on.
-
Morphological Chart
Jung Yun So
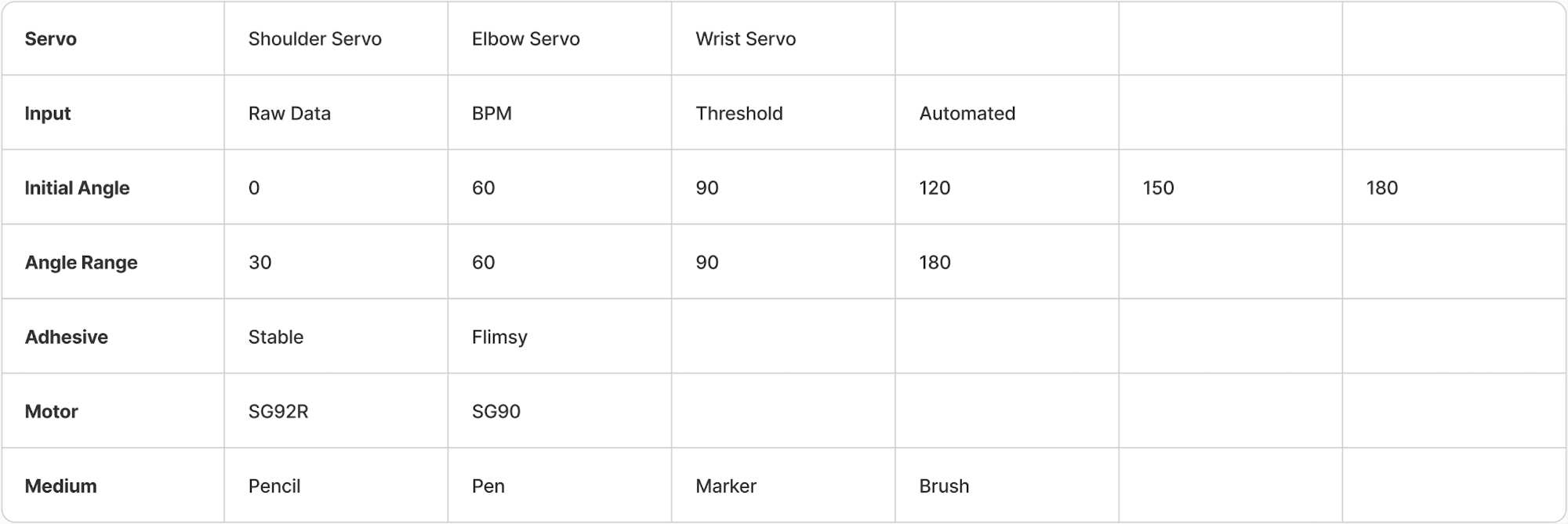
The first category of options is the type of input data. Initially, I tried to think of different options for normalising the data but soon realised I simply assign an angle and range as well, and so normalised all the data into a range between zero and one. For the angles, I divided them into two categories:
one for the starting position and another for the range of movement. By doing this, I no longer need to adjust the normalisation. I also considered calculating the variance (HRV) as an option for the input, but decided not to because of how long it takes to get the reading in real time.
-

Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
I would also like to try out different motors. However, the motors that I have ordered will be arriving next week so I will make more iterations using them next week. Also, my EEG device is coming in next week so it would be nice to experiment with both, and also use different mediums as well when they arrive. As for the duration, the user just stopped when they felt that the outcome was 'finished'.
One less straightforward factor I included is the stability of the adhesive used to connect the servos to the sticks. This idea emerged by chance when I tried using tape instead of a glue gun. While the tape was sticky enough to hold, it introduced a lot of variance in the movements, meaning it was less stable and more flimsy and bouncy compared to the glue gun.
User Testing
Input from myself and my peers DN, SH, and YP. They chose the options based on their own judgement, although I did recommend some settings while explaining.
User: SH (BPM: 62~82)
" This was very cool. I like that this outcome is something only I could create, like a finger print. I would also be curious to see how it looks when it becomes more refined. "
-

Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-

Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-

Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-
Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
User: YP (BPM: 59~112)
" This is a very novel idea for me, and I'm not sure how it works, but that's what makes it more interesting. I like the different options, it feels more customaised. "
-

Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-
Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-
Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-

Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-
Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-
Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
User: DN (BPM: 71~109)
" I like the different options for the parameters, especially since it helped me to understand how my physiological signals are being translated. I wonder how it would have been if I weren't allowed to choose the different options. "
-

Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-
Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-
Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
User: Myself (BPM: 79~115)
My favourites are the flimsy ones. During the middle of the recording, the brachiograph flew off and started moving on its own. So a change in the position of the shoulder servo motor. After letting it run for a while, I stopped it. The serendipitous appeal and visual variance made me realise that I don’t need to make a stable product. It might even be better if the outcome is difficult to read, i.e. it is difficult to determine how the input is directly translated to the drawing.
-

Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-
Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-
Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-

Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
-

Components of a Servo
solomotorcontrollers.com/blog/servo-motor/
Reflection
It would be exciting to test different mediums, especially on how they react in relation to the wrist servo. I do wonder if my choice to let each user set their own angle diminished the element of self representation. As in, the values of the BPM might have lost some of its visual representation due to autonomously setting the angles.
I’m also considering revising the code to make the outcomes less repetitive. For instance, I could adjust the elbow servo values in response to changes in the shoulder servo, adding more complexity and reducing the circularity of the movements. Also, I could try making the outcomes less circular. For example, I could add values to the elbow servo when the values for the shoulder servo goes down.
This leads to an interesting paradox I noticed during user testing. When users can set their own parameters, their sense of agency increases, as confirmed by their feedback. However, they also expect to see a unique, individualised outcome in comparison to others based solely on their input (when the parameters for the settings are the same). I’m excited to explore more of this balance between agency and individuality / self. My plan for next week is using different options for the input and output, slowly evolving this overall idea of biofeedback to physical. At the moment, I’m experimenting with digital outcomes like p5js or processing, so I will be sharing that as well.
The Three Pillars
-
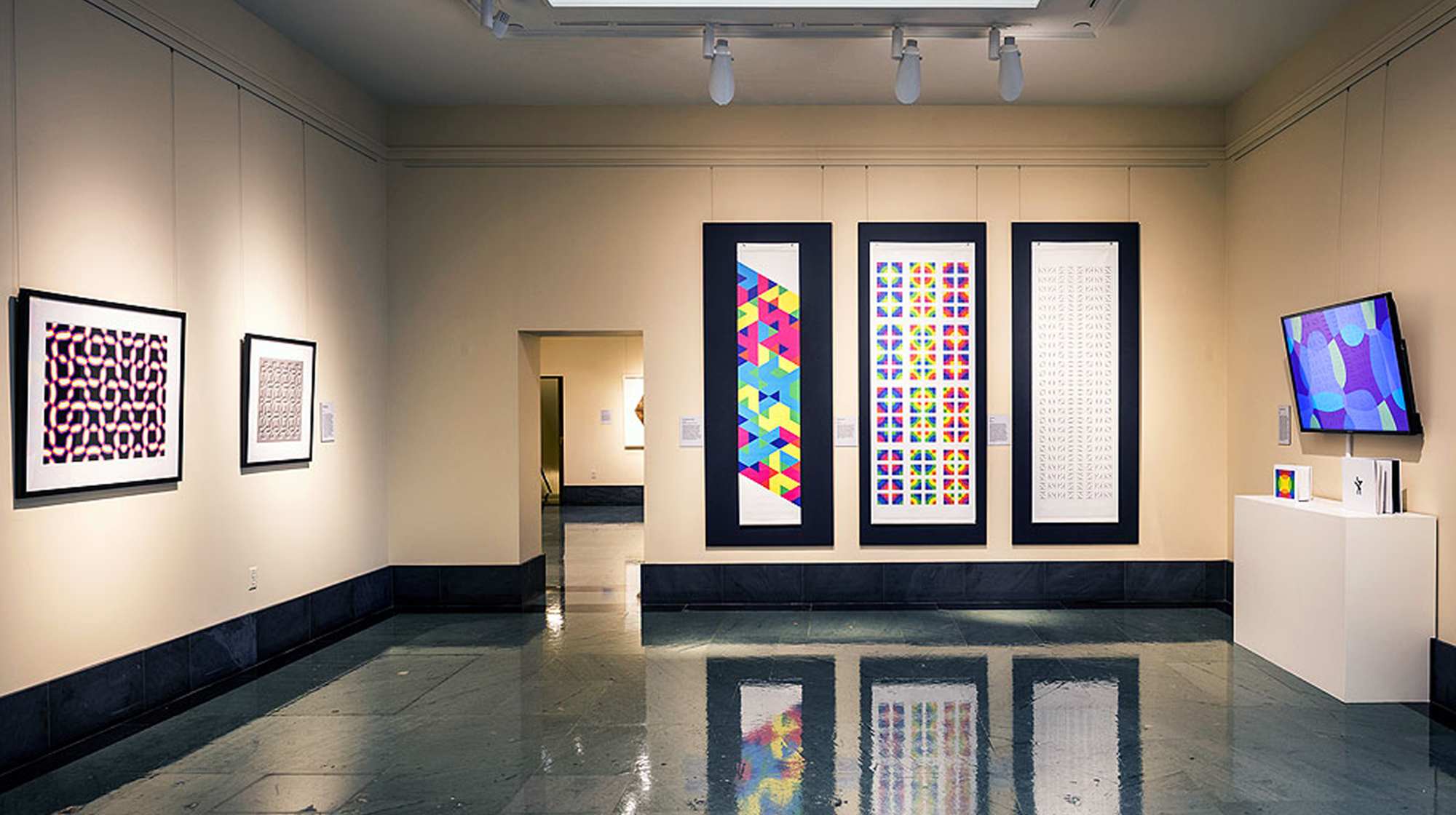
Paul Brown: Process, Chance and Serendipity. Installation View, National Academy of Sciences, Washington DC
studiointernational.com/paul-brown-process-chance-serendipity-art-that-makes-itself-review-national-academy-sciences-washington
I am also categorising my concept into three main themes, mainly to organise my reading list for my dissertation. I find myself circling around three central themes that seem to consistently guide my thinking. All three inform one another and create a framework that holds together my project. Defining them helps me clarify my research questions and stay focused as I move forward.
The first pillar—Serendipity in Generative Art—is one of my most consistent interests, spanning from last year. I keep coming across them from my experiments. I’ve been attracted by the idea that not all creative outcomes are intentional, and often, the most compelling works arise from unexpected accidents or errors. In generative art, machines produce these unplanned variations, and I also find myself wondering how much of the final result is the machine’s doing and how much is mine. I hope to examine the tension between control and randomness.
-
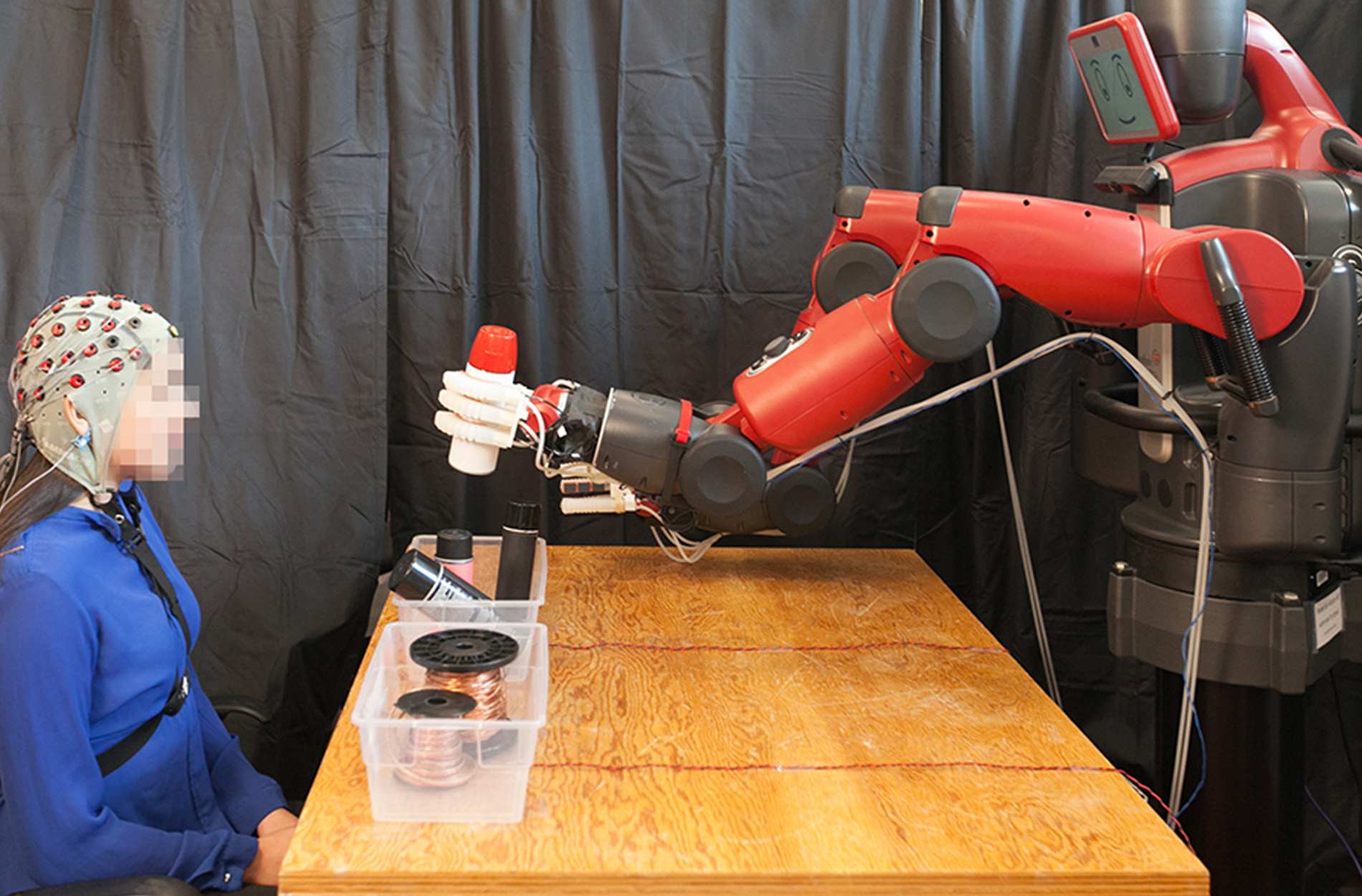
A system where brain signals instantly correct robot mistakes by MIT CSAIL and Boston University
robohub.org/mind-control-correcting-robot-mistakes-using-eeg-brain-signals/
The second pillar is Electroencephalogram (EEG) as Involuntary Feedback. I’ve chosen to use EEG because of its capacity to capture involuntary activity, as well as the narrative of consciousness, tying back to machine ego and agency, which were my entry points to this entire topic. Also, there’s something very intriguing about the idea of using one’s own brain waves, an element of ourselves that reflects our physiological state. This lets me discuss the definition of self representation as well.
And the distinction between voluntary and involuntary feedback, which pushes the boundaries of traditional interactive systems that rely on deliberate inputs, often keeping clarity as the main consideration. EEG’s role as a form of data input also challenges ideas of authorship, making it the primary aspect of my research into how artists interact with generative systems. Which brings us to our third pillar.
-
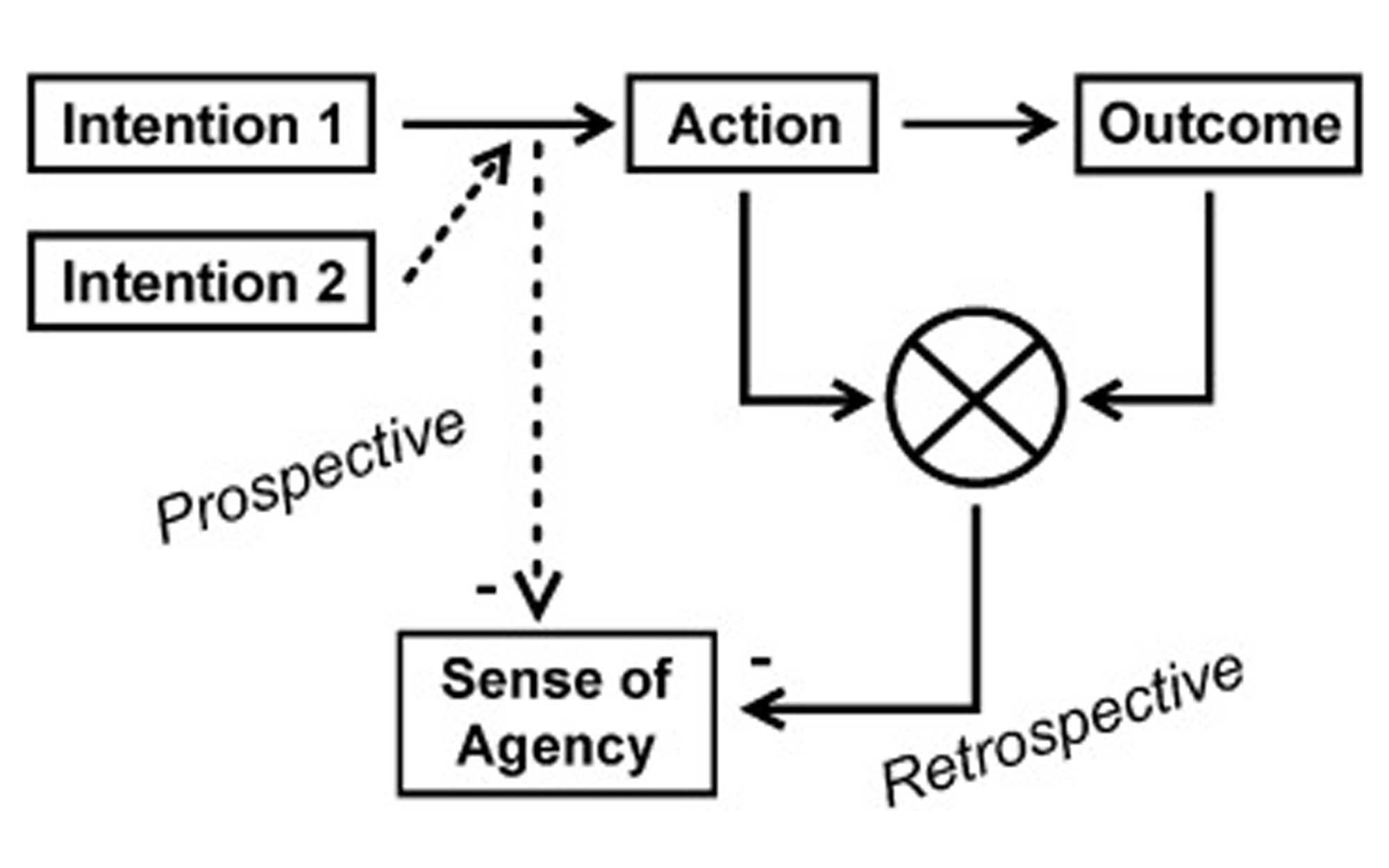
Prospective and retrospective systems inform the sense of agency
Sidarus, Nura & Haggard, Patrick. (2016). Difficult action decisions reduce the sense of agency: A study using the Eriksen flanker task. Acta Psychologica. 166. 1-11. 10.1016/j.actpsy.2016.03.003.
The third pillar, Sense of Agency through Interactivity, is both an introduction to the narrative and objective of the research as well as establishing a connection between the preceding two pillars. Do we still feel a sense of authorship and self representation if the input is something I can’t control? I want to understand how this sense of agency, or lack thereof, affects both the creative process and the interpretation of the work.
This pillar is necessary because, ultimately, my research isn’t just about how machines and biofeedback generate art but about how humans relate to these systems and perceive their own role within them. While they may change as I move on with my project and research, I know all three will be a theme worth exploring in order to build up to the outcome.